Cours Cinématique terminale générale
Résumé de cours Exercices et corrigés
Cours en ligne de Physique-Chimie en Terminale
La réussite au baccalauréat nécessite de maîtriser le cours sur la Cinématique en terminale générale, quitte à prendre des cours particuliers de Physique-Chimie en cas de lacunes. Retrouvez les autres chapitres de Physique-Chimie de terminale, dans nos cours en ligne de terminale en Physique-Chimie ! Ils vous seront utiles pour maîtriser la Physique-Chimie qui a un fort coefficient au bac, comme vous pouvez le vérifier sur notre simulateur du bac. N’hésitez pas à prendre des cours de physique chimie pour exceller en cinématique !
A. Le vecteur position en terminale générale
1. Un référentiel est un solide
On peut en extraire un point origine  , et trois vecteurs non coplanaires
, et trois vecteurs non coplanaires  .
.
 forme alors lui-même un référentiel.
forme alors lui-même un référentiel.
Si les trois vecteurs sont deux à deux orthogonaux, et de norme 1, on les note avec des minuscules et
 forme un référentiel orthonormal.
forme un référentiel orthonormal.
Exemple
Le référentiel terrestre est lié à la Terre. Définir deux référentiels orthonormaux distincts, l’un de centre un point  du sol terrestre, et un de centre confondu avec le centre
du sol terrestre, et un de centre confondu avec le centre  de la Terre.
de la Terre.
Correction :
* En , on peut définir trois vecteurs de norme 1 :  dirigé vers le Nord,
dirigé vers le Nord,  dirigé vers l’ouest et
dirigé vers l’ouest et  vertical dirigé vers le haut.
vertical dirigé vers le haut.
 forme un référentiel terrestre orthonormal.
forme un référentiel terrestre orthonormal.
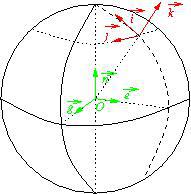
* Autour de , on peut définir trois vecteurs de norme 1 :  dirigé vers le pôle Nord,
dirigé vers le pôle Nord,  dirigé vers le point équatorial du méridien de Greenwich et
dirigé vers le point équatorial du méridien de Greenwich et  dirigé vers le point de l’équateur du méridien 90° est (il passe au milieu du golfe du Bengale).
dirigé vers le point de l’équateur du méridien 90° est (il passe au milieu du golfe du Bengale).
 forme un référentiel terrestre orthonormal.
forme un référentiel terrestre orthonormal.
2. Le vecteur position en Terminale
Le vecteur position est le vecteur qui définit la position d’un point mobile  à une date
à une date  donnée.
donnée.
Dans le référentiel (orthonormal) , on peut écrire

On peut alors écrire

Exemple
Si est un point du sol terrestre, dans le repère terrestre orthonormal terrestre , où est un vecteur vertical dirigé vers le haut, quels noms donne-t-on aux coordonnées  ,
,  et
et  ?
?
Correction : est l’abscisse, l’ordonnée et la cote ou l’altitude.
B.Vecteurs vitesse et accélération en terminale
1. Le vecteur vitesse en Terminale
Le vecteur vitesse a pour direction la tangente à la trajectoire, pour sens celui du déplacement du point étudié, pour norme la vitesse instantanée de , exprimée en 
Il est égal à la dérivée par rapport au temps du vecteur position 

Dans le repère  associé au référentiel d’étude, ses coordonnées sont égales aux dérivées par rapport au temps des coordonnées de
associé au référentiel d’étude, ses coordonnées sont égales aux dérivées par rapport au temps des coordonnées de

Exemple
a. Déterminer le vecteur vitesse pour le point dont le mouvement est défini par les équations horaires

b. Calculer la norme de la vitesse à l’instant 
Correction :
a. On calcule les dérivées



donc 
b. On calcule

donc 
soit 
2. Le vecteur accélération en Terminale
Le vecteur accélération a pour direction et sens ceux de l’inflexion du vecteur vitesse, et pour norme l’accélération instantanée de , exprimée en 
Pour comprendre le sens physique de l’accélération, on peut l’exprimer en « mètres par seconde par seconde ». Ainsi, l’accélération de la pesanteur, qui est en particulier celle d’un mobile qu’on laisse chuter verticalement, vaut environ 10 mètres par seconde par seconde, soient  par seconde. On en déduit que lors de la chute libre verticale d’un mobile, sa vitesse augmente de chaque seconde. Si sa vitesse est nulle à l’instant initial, elle vaut (en négligeant les frottements) au bout d’une seconde,
par seconde. On en déduit que lors de la chute libre verticale d’un mobile, sa vitesse augmente de chaque seconde. Si sa vitesse est nulle à l’instant initial, elle vaut (en négligeant les frottements) au bout d’une seconde,  au bout de deux secondes,
au bout de deux secondes,  au bout de trois secondes, etc.
au bout de trois secondes, etc.
Il est égal à la dérivée par rapport au temps du vecteur vitesse  , donc à la dérivée seconde de
, donc à la dérivée seconde de

Dans le repère associé au référentiel d’étude, ses coordonnées sont égales aux dérivées par rapport au temps des coordonnées de , donc aux dérivées secondes de

Exemple
Déterminer le vecteur accélération pour le point dont le mouvement est défini par les équations horaires (cf. exemple précédent)
Correction :
On a déjà établi que
On en déduit que 
3. Construction graphique en Terminale
On dispose d’un chronogramme, c’est-à-dire d’un document graphique donnant les positions successives de à des dates régulièrement espacées,
 ,
,  ,
,  , …,
, …,  , … où
, … où est une durée (le pas temporel du chronogramme) et
est une durée (le pas temporel du chronogramme) et  un nombre entier naturel.
un nombre entier naturel.
Pour  , on obtient une bonne estimation du vecteur vitesse à la date
, on obtient une bonne estimation du vecteur vitesse à la date  par
par

soit 
Voici le procédé de construction.
* On construit le vecteur  joignant les points avant et après
joignant les points avant et après 
* Sa direction et son sens sont ceux du vecteur vitesse 
On mesure la norme du vecteur  , celle du vecteur vitesse est égale à
, celle du vecteur vitesse est égale à

On calcule cette norme.
* On choisit une échelle de représentation graphique 
* On trace le vecteur vitesse à partir de avec la direction, le sens, et la longueur donnée par l’échelle choisie.
On procède de même pour tracer une estimation du vecteur accélération.

Exemple
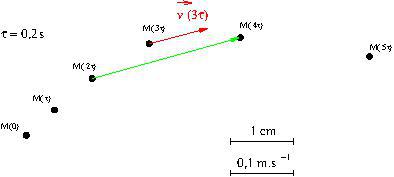
Sur le document suivant, pour déterminer  , on construit le vecteur
, on construit le vecteur  , il mesure environ 2,4 cm, on en déduit que
, il mesure environ 2,4 cm, on en déduit que

On construit donc à l’échelle un vecteur d’environ 1,2 cm, à partir du point  , parallèle et de même sens que
, parallèle et de même sens que
C. Étude du mouvement rectiligne en terminale
Un point a un mouvement rectiligne s’il se déplace sur une droite, donc si sa trajectoire forme un segment de droite.
Il est alors naturel de choisir un point origine sur cette droite et de nommer  ,
,  ou
ou  le référentiel d’étude selon cette droite orientée.
le référentiel d’étude selon cette droite orientée.
a un mouvement est rectiligne uniforme si son vecteur vitesse est constant, ou de façon équivalente si son vecteur accélération  est nul.
est nul.
Pour un mouvement selon l’axe , on en déduit



où  est la vitesse algébrique (constante) et
est la vitesse algébrique (constante) et  l’abscisse à l’instant initial
l’abscisse à l’instant initial
Exemple
Un mobile se déplace sur l’axe a pour équation horaire

a. Vérifier que c’est un mouvement rectiligne uniforme.
b. Quelle est sa vitesse ? Commenter son signe.
c. Calculer son abscisse initiale 
d. Calculer la date à laquelle 
Correction :
a. On a
 = constante
= constante

b.  donc le mouvement se fait dans le sens des décroissants, à une vitesse de norme
donc le mouvement se fait dans le sens des décroissants, à une vitesse de norme

c. 
d. 
soit 
2. Un point  a un mouvement rectiligne
a un mouvement rectiligne
Ce mouvement est rectiligne accéléré (on devrait dire « rectiligne uniformément accéléré ») si son vecteur accélération est constant, selon l’axe du mouvement.
Pour un mouvement selon l’axe , on en déduit



où  est l’accélération algébrique (constante),
est l’accélération algébrique (constante),  la vitesse algébrique et l’abscisse à l’instant initial
la vitesse algébrique et l’abscisse à l’instant initial
Démonstration de cours : Établir les expressions de  et de
et de 
* On a par définition

donc en primitivant

où  est une constante.
est une constante.
À l’instant initial on en déduit

donc 
* On a par définition

donc en primitivant

où  est une constante.
est une constante.
À l’instant initial on en déduit

donc 
1. Le mouvement circulaire en Terminale
a un mouvement est circulaire si sa trajectoire est un arc de cercle de centre et rayon  .
.
Le mouvement est circulaire et uniforme si la norme  de sa vitesse est constante.
de sa vitesse est constante.
ATTENTION ! Ce n’est pas le vecteur vitesse qui est constant, donc l’accélération du point n’est pas nulle.
Lorsque fait un tour complet du cercle, il parcourt une distance égale au périmètre du cercle  . La durée de parcours est la période
. La durée de parcours est la période  du mouvement.
du mouvement.
On a donc
 ou
ou 
Exemple
Le centre de la Terre décrit un mouvement à peu près circulaire et uniforme autour du centre du Soleil, de rayon  avec une période égale à une année terrestre, soit 365,25 jours. Calculer la norme de la vitesse.
avec une période égale à une année terrestre, soit 365,25 jours. Calculer la norme de la vitesse.
Correction :
On convertit en secondes :


On en déduit

2. La description cinématique en Terminale
La description cinématique (vecteurs position, vitesse, accélération) d’un mouvement circulaire n’est pas aisée dans un référentiel (référentiel « cartésien »)
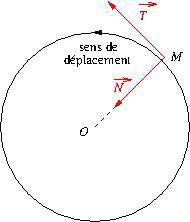
On préfère travailler en utilisant le repère de Frenet défini ainsi :
à une date , se trouve en un point du cercle et tourne dans un sens donné
* le vecteur tangent  est un vecteur de norme 1, tangent au cercle et orienté dans le sens du déplacement
est un vecteur de norme 1, tangent au cercle et orienté dans le sens du déplacement
* le vecteur normal  est un vecteur de norme 1, perpendiculaire dans le plan du cercle au vecteur et orienté vers le centre du cercle.
est un vecteur de norme 1, perpendiculaire dans le plan du cercle au vecteur et orienté vers le centre du cercle.
3. Mouvement circulaire et vitesse en Terminale
Un point en mouvement circulaire, de centre , de rayon , a pour vitesse  , constante si le mouvement est circulaire uniforme, non constante si le mouvement est circulaire non uniforme.
, constante si le mouvement est circulaire uniforme, non constante si le mouvement est circulaire non uniforme.
Dans le repère de Frenet, voici les expressions des vecteurs vitesse et accélération.
* 
* 
 est appelée l’accélération tangentielle
est appelée l’accélération tangentielle
 est appelée l’accélération normale.
est appelée l’accélération normale.
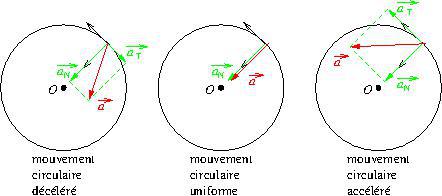
Si le mouvement est circulaire uniforme à la vitesse alors

Elle est donc dirigée vers le centre et dite « centripète« . Ceci est conforme au fait que le vecteur accélération a la direction et le sens de l’inflexion du vecteur vitesse.
Si le mouvement est circulaire et accéléré ( est une fonction croissante de ), alors l’accélération a deux coordonnées positives dans la base de Frenet.
Si le mouvement est circulaire et décéléré ( est une fonction décroissante de ), alors l’accélération a une coordonnée positive sur et négative sur dans la base de Frenet.
Exemple
Un pilote de chasse a un mouvement circulaire de rayon  , uniforme à la vitesse
, uniforme à la vitesse 
Quelle est la norme de l’accélération qu’il subit ?
Correction :

(soit 7,4 « g », 7,4 fois l’accélération de la pesanteur).
Retrouvez et entraînez-vous sur toutes les annales du bac de physique sur la Cinématique et toutes nos annales du bac de terminale afin d’être absolument certain de maîtriser au mieux le programme de terminale de physique-chimie. Vous pourrez ainsi être plus que serein au moment des résultats du bac. Voici aussi, quelques autres chapitres de physique-chimie à bien connaître pour exceller au bac :
- Cours mécanique des fluides en terminale
- Cours en ligne mouvements dans un champ uniforme terminale
- Cours sur les lois de Newton niveau bac
- Cours sur les acides et les bases en terminale
- Résumé de cours mesures physiques en chimie
- Exercices corrigés de cinématique en terminale
- Exercices corrigés de mécanique des fluides en terminale